modoでパーティクルをサーフェースに沿ってうず状に動かす表現について書いてみたいと思います。 スケマティックはこんな感じです。 スケマティックの右側は以前書いた「パーティクルをサーフェースに […]
Tips
modoでパーティクルをサーフェースでうず状に動かす表現
![]()
modoでパーティクルをサーフェースに沿ってうず状に動かす表現について書いてみたいと思います。 スケマティックはこんな感じです。 スケマティックの右側は以前書いた「パーティクルをサーフェースに […]
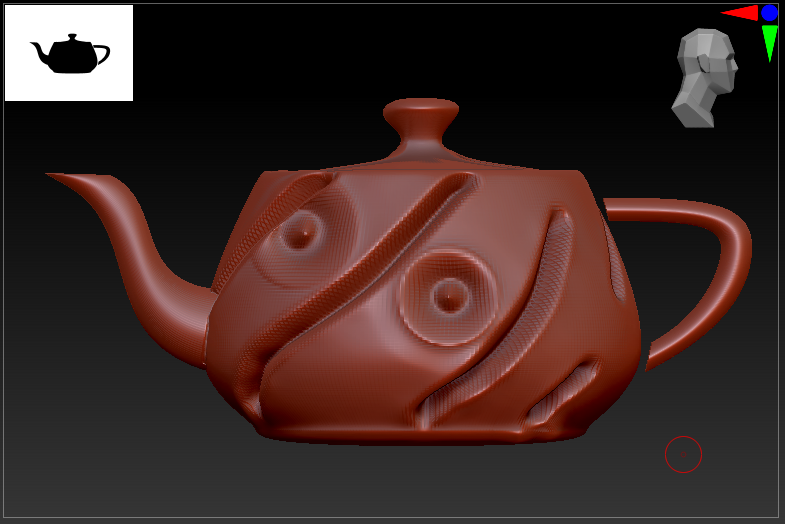
ZBrushで利用頻度の高い基本操作や、ツール操作をまとめたページです。 ZBrushはモディファイヤキー(Ctrl Shift Alt)を組み合わせて使用しますが、キー入力後に別のキーを押したり、キー入力後にキーをはな […]

ZBrush関連の記事まとめページです。 modo関連
ZBrushで作成したディスプレイスメントマップをmodoで使用する方法について書いてみます。使用バージョンはmodo 14.0、ZBrush 2020.1.4です。 ZBrushでディスプレイスメントマッ […]
modoとZBrushを併用する場合の注意点について書いてみます。 ZBrushは他の3Dソフトに比べて独自の制限や動作があります。全てZBrush内で作業が完結するのであれば問題ないかも知れませんが、modoで作成した […]
modo 14.1から追加されたIntel Open Image Denoise使ってみた。modoには何種類かデノイズが搭載されてますが、Intel Open Image Denoiseは他のデノイズに比べて良好な結果 […]
modoでランダムにパーティクルを動かす方法について書いてみます。 グリッド ■ サンプルファイル スケマティックはこんな感じ。 Particle Operatorに「ID」「位置(R/O)」 […]

Oculus QuestとOculus Linkを使用してmodo VR使ってみた。使用方法は簡単です。Oculus Linkを使用してPCにQuestを接続した状態でmodoを起動し、VRタブをクリックするとQuest […]
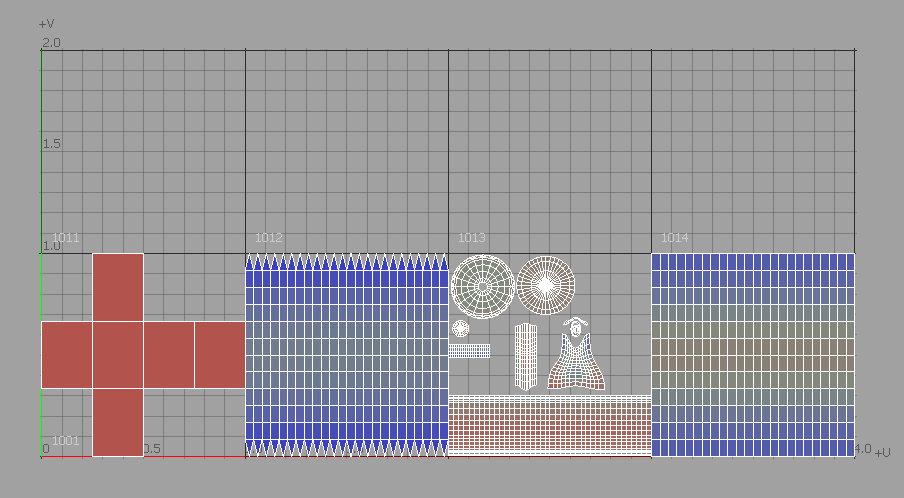
modoのUDIMの使い方について書いてみます。AfterEffectsやPremiereなどの動画編集ソフトでは連番画像を1つの素材として扱いますが、UDIMを使用すると複数のテクスチャ画像を1つの画像レイヤーとして扱 […]
「パーティクル色の使い方」の応用で、パーティクルの速度でアイテムの色を変える方法について書いてみたいと思います。 modoのグラディエントレイヤーは様々な「入力パラメータ」を使用して色を設定することができま […]
modoのパーティクルでアイテムを切り替える方法について書いてみます。 衝突でアイテム切り替え ■サンプルファイル スケマティックはこんな感じです。Particle Operatorの「アイテ […]
たまにしかインストールしないので、GoZ for Modoのインストール方法をメモしときます。今回はmodo 14.0とZBrush 2020.1を使用しました。 GoZ for Modoのインストール方法 […]
modoで糸やバスケットを編む表現を作ってみた。 糸 ■ サンプルファイル スケマティックはこんな感じです。 Spiral Curveでカーブを1本作って、TransformやTwistでアニメーションさせ […]
modoでプロシージャルリボンの作り方について書いてみます。 リボンのような形状を作る場合は「プロシージャルロープの作り方」と同じようにCurve Sweepを使う方法や、スプラインデフォーマを使う方法が定番だと思います […]
modoでカーブから面を押し出す方法について書いてみます。 Illustratorで作成したパスや、パーティクルで生成したカーブから面を押し出したいことがあります。 そんなときはPolygon Extrud […]