前回に引き続きIK制御に関連したリグの作り方です。IKで制御されている関節の位置にコントローラーを配置して、そのコントローラーを回転してアップベクターを制御するリグの作り方を書いてみます。 このリグは好き好 […]
Tips
modoで関節の位置にあるロケータでアップベクターを制御する方法
![]()
前回に引き続きIK制御に関連したリグの作り方です。IKで制御されている関節の位置にコントローラーを配置して、そのコントローラーを回転してアップベクターを制御するリグの作り方を書いてみます。 このリグは好き好 […]
前回modoのIKについて書いたので、ついでにIKに関連したリグの組み方の例として、IKゴールの移動範囲を腕や脚の長さより遠くに移動しないように制限する方法を書いてみます。 LightWave のIKには「 […]
modo 11からReplicatorのパフォーマンスが改善されました。Cboxのサンプルファイルを見てて気がつきましたが、modo 10に比べて2倍以上早くなってました。 このシーンはキャラクターがパーティクルで533 […]
modoのIKについて書いてみたいと思います。 modoには「Dual Joint Planar IK」と「Full Body IK」2種類のIKがあります(13.2以降は3種類)。それぞれメリットとデメリットがあり、ア […]

ゲームのModか何かでしょうか? Animation、VFXなどジャンルごとに結果が発表されています。アニメーションもエフェクトも良い動き。 http://polycount.com/discussion/198865/ […]
トランスフォーム コンストレイントを使用して、複数のアイテムの位置や回転をブレンドするリグの作り方について書いてみたいと思います。 3DCGは意外とカメラの制御が難しかったりします。例えば商品説明のように決められたカメラ […]

Naughty Dog のコンセプトアーティストがmodoのチュートリアルを販売してるみたいです。 作者は環境デザインが専門で、Uncharted 4、Last of Us、Uncharted 3 などのタイトルに参加し […]
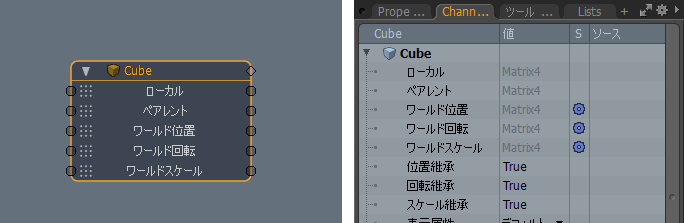
チャンネルタイプの続きで、modoのマトリクス(行列)チャンネルについて書いてみます。 普通に3Dソフト使ってたときはマトリクスって何?という感じでよくわかってませんでした。今も正確なとことろは全くわかってませんが、リグ […]